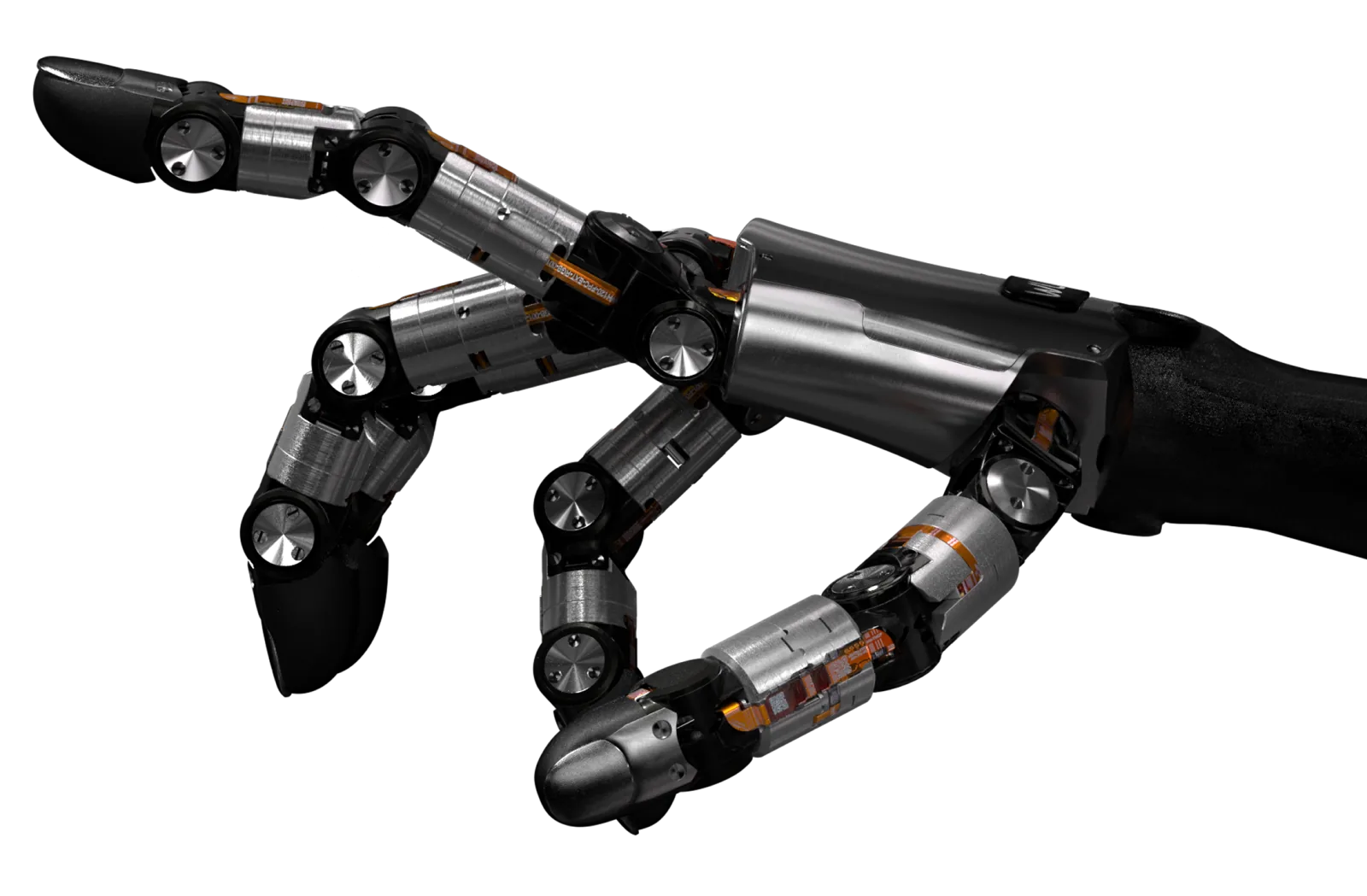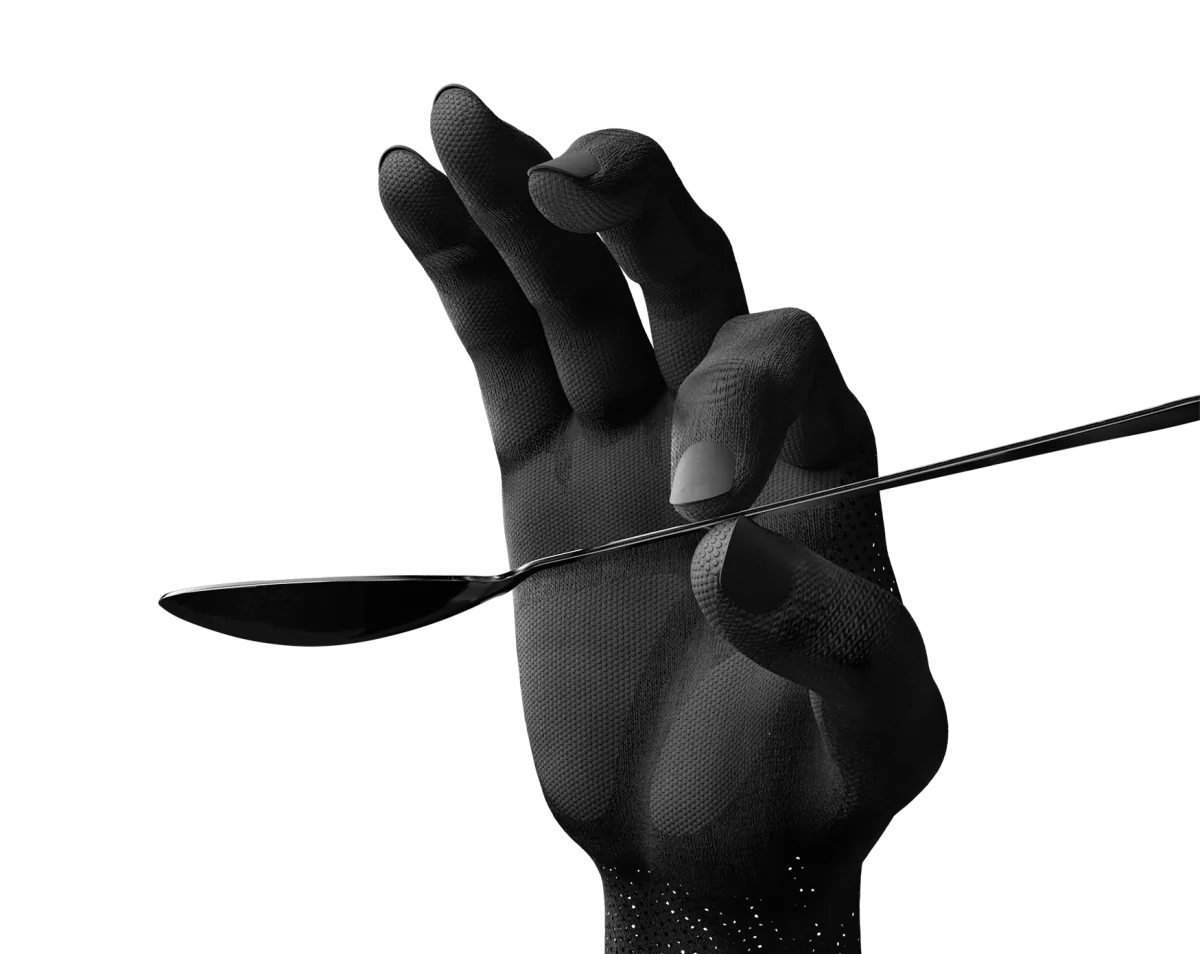
Precision Pinch


Founded in 2019, Wuji Technology leads in dexterous manipulation solutions, from motor to hand and data collection, bringing dexterity to robots and accelerating general physical intelligence.
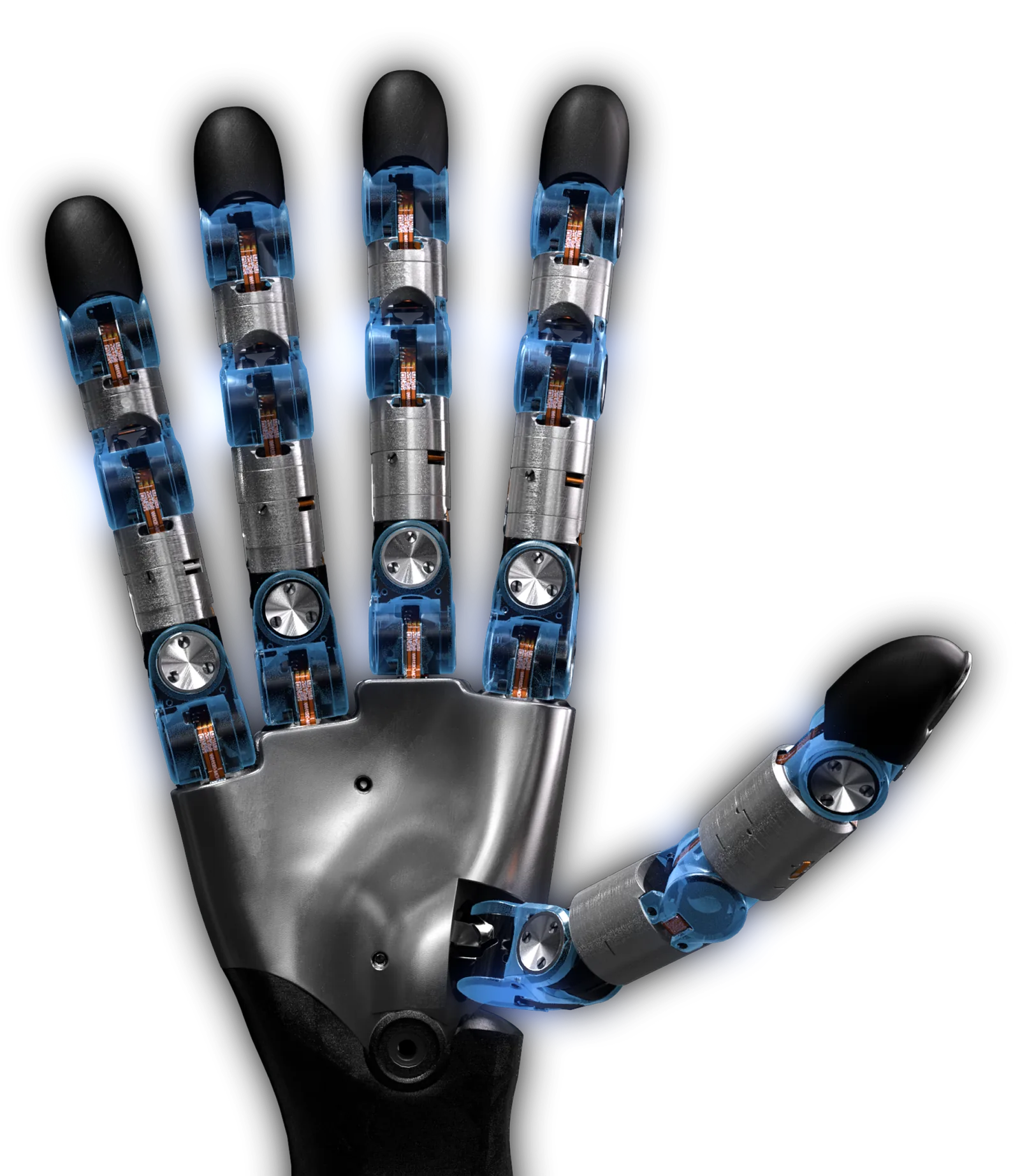





From physical toughness to integration ease, every detail is engineered to minimize maintenance costs and shorten recovery time from failures, so you can focus on research and innovation with confidence.

Unified device access and real-time visualization for a one-stop development and debugging experience.

Native support, seamless integration with robotic systems.
High-fidelity simulation models that support Sim-to-Real training.

Supports multiple input methods, including Wuji Glove, Apple Vision Pro, and Intel RealSense.



* These specifications reflect the current Beta1 product and the SPEC will continue to iterate. For the latest, see the Beta1 product documentation .
Access Wuji Hand 2 documentation, contact the team, or explore Wuji open-source projects.